Usage
In this example we will use co2mpas_driver model in order to extract the drivers acceleration behavior as approaching the target speed.
Setup
First, set up python, numpy, matplotlib.
Set up python environment: numpy for numerical routines, and matplotlib for plotting
>>> import numpy as np >>> import matplotlib.pyplot as plt
co2mpas_driver must be imported as a dispatcher (dsp). The dsp contains functions to process vehicle data and run the com2pas_driver model. Also is necessary to import schedula for selecting and executing functions from the co2mpas_driver. For more information on how to use schedula: https://pypi.org/project/schedula/
>>> from co2mpas_driver import dsp >>> import schedula as sh
Load data
Load vehicle data for a specific vehicle from vehicles database
>>> db_path = 'EuroSegmentCar.csv'
Load user input parameters from an excel file
>>> input_path = 'sample.xlsx'
Sample time series
>>> sim_step = 0.1 #The simulation step in seconds >>> duration = 100 #Duration of the simulation in seconds >>> times = np.arange(0, duration + sim_step, sim_step)
Load user input parameters directly writing in your sample script
>>> inputs = { 'vehicle_id': 35135, # A sample car id from the database 'inputs': {'gear_shifting_style': 0.7, #The gear shifting style as described in the TRR paper 'starting_speed': 0, 'desired_velocity': 40, 'driver_style': 1}, # gear shifting can take value # from 0(timid driver) to 1(aggressive driver) 'time_series': {'times': times} }
Dispatcher
Dispatcher will select and execute the proper functions for the given inputs and the requested outputs
>>> core = dsp(dict(db_path=db_path, input_path=input_path, inputs=inputs), outputs=['outputs'], shrink=True)
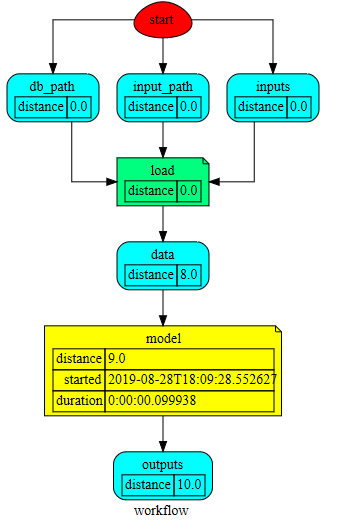
Plot workflow of the core model from the dispatcher
>>> core.plot()
This will plot the workflow of the core model on an internet browser (see below). You can click all the rectangular boxes to see in detail the sub-models like load, model, write and plot.
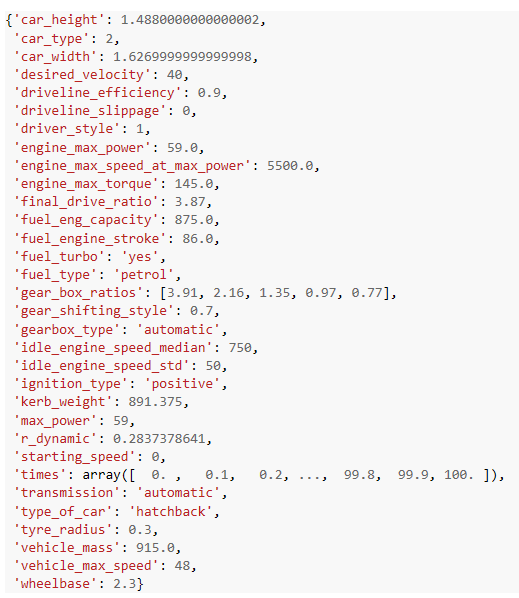
The Load module
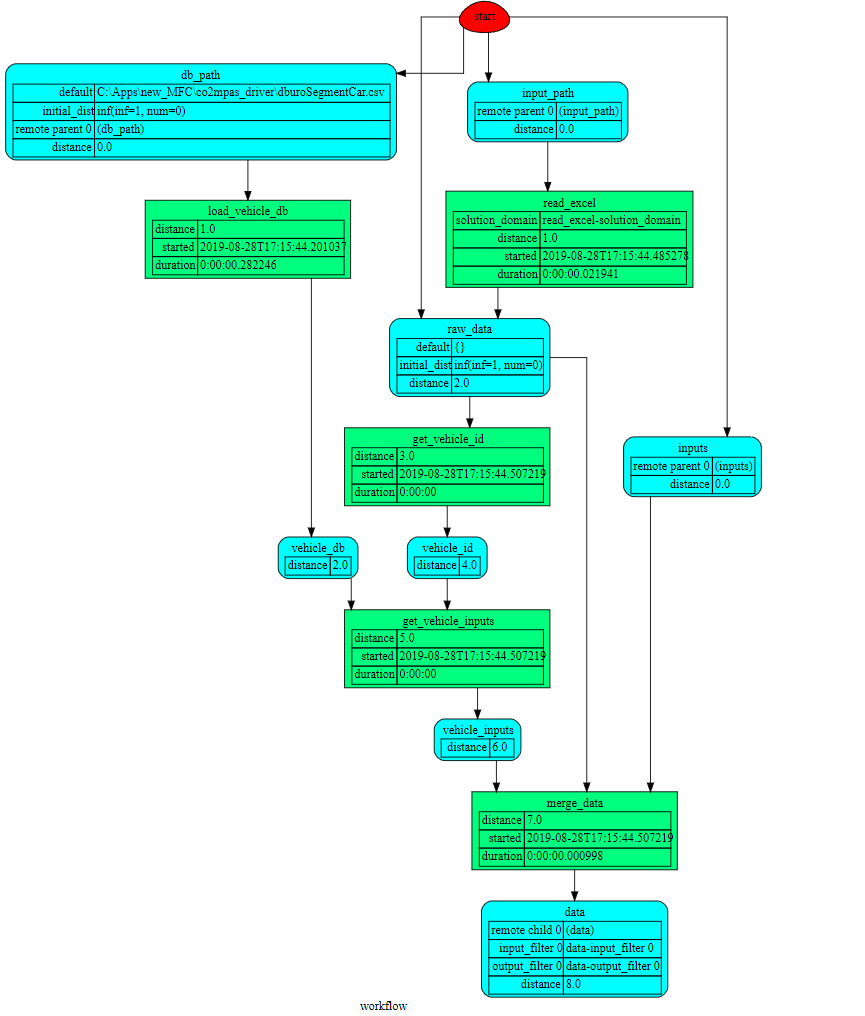
Merged vehicle data for the vehicle_id used above
Load outputs of dispatcher and select the chosen dictionary key (outputs) from the given dictionary.
>>> outputs = sh.selector(['outputs'], sh.selector(['outputs'], core))
Select the desired output
>>> output = sh.selector(['Curves', 'poly_spline', 'Start', 'Stop', 'gs', 'discrete_acceleration_curves', 'velocities', 'accelerations', 'transmission'], outputs['outputs'])
The final acceleration curves, the engine acceleration potential curves (poly_spline), start, stop, gear shift, discrete acceleration curves, velocities, accelerations and transmission, before calculating the resistances and the limitation due to max possible acceleration (friction).
>>> curves, poly_spline, start, stop, gs, discrete_acceleration_curves, velocities, accelerations, transmission = output['Curves'], output['poly_spline'], output['Start'], output['Stop'], output['gs'], output['discrete_acceleration_curves'], output['velocities'], output['accelerations'], output['transmission']
Plot
>>> plt.figure('Time-Speed')
>>> plt.plot(times, velocities)
>>> plt.grid()
>>> plt.figure('Speed-Acceleration')
>>> plt.plot(velocities, accelerations)
>>> plt.grid()
>>> plt.figure('Acceleration-Time')
>>> plt.plot(times, accelerations)
>>> plt.grid()
>>> plt.figure('Speed-Acceleration')
>>> for curve in discrete_acceleration_curves:
sp_bins = list(curve['x'])
acceleration = list(curve['y'])
plt.plot(sp_bins, acceleration, 'k')
>>> plt.show()
Results
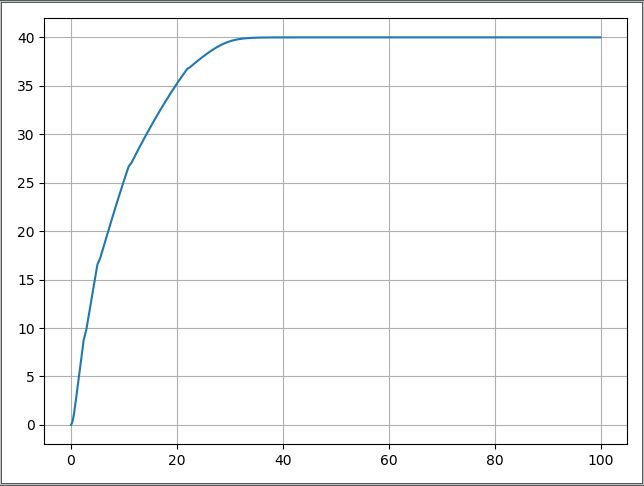
Figure 1. Speed(m/s) versus time(s) graph over the desired speed range.
Acceleration(m/s*2) versus speed(m/s) graph
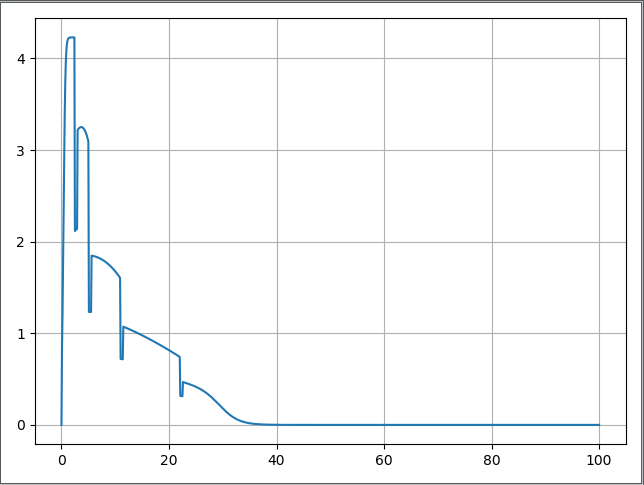
Figure 2. Acceleration per gear, the gear-shifting points and final acceleration potential of our selected vehicle over the desired speed range.
Acceleration(m/s*2) versus speed graph(m/s)
Figure 3. The final acceleration potential of our selected vehicle over the desired speed range.
Energy consumption calcultaion
From the version 1.3.3 the energy consumption calculation have been added. You can find a full example here: energy consumption example